Difference between revisions of "49-Way Joystick Conversion Board"
Jump to navigation
Jump to search
| Line 64: | Line 64: | ||
</gallery> | </gallery> | ||
| − | Amtel Microprocessor Source Code: | + | ==Amtel Microprocessor Source Code:== |
<nowiki> | <nowiki> | ||
//Program Written By: Brad Raedel | //Program Written By: Brad Raedel | ||
| + | //03242020 - Revision A | ||
| + | //** All 8 Profiles active | ||
| + | //** Outputs now change to inputs when not active - This allows the pull-up resistors to control the high logic | ||
//03162020 - Revision 1 - Just get it working | //03162020 - Revision 1 - Just get it working | ||
Revision as of 13:12, 25 March 2020
Contents
49-Way Joystick Information
The Williams 49-Way Optical Joystick was advanced for the time. As the device relied on optical interrupter switches, there were no contacts to wear out or adjust.
Operation - Pinout
- 3 Optical Interrupter Switches are used for each direction (Up/Down-Y and Left/Right -X) .Total of 6 switches
- This provides a total of 7 possible positions in each X and Y axis. (3 Up/1 Center/3 Down - 3 Left/1 Center/3 Right) (7 * 7 = 49 Unique positions)
- There are 8 unique outputs
- Opto Swtich 1 (U/D)
- Opto Switch 2 (U/D)
- Opto Switch 3 (U/D)
- Up/Down Direction
- Opto Switch 4 (L/R)
- Opto Switch 5 (L/R)
- Opto Switch 6 (L/R)
- Left/Right Direction
- 12 Pin Molex Header Pin-Out
- +5 Volts
- Opto Switch 1 (U/D)
- Opto Switch 2 (U/D)
- Opto Switch 3 (U/D)
- Up/Down Direction (Up=Low / Down = High)
- Opto Switch 4 (L/R)
- Opto Switch 5 (L/R)
- Opto Switch 6 (L/R)
- Left/Right Direction (Right = Low / Left = High)
- Key - No Connection
- Ground
- Ground
Custom PCB - Drop-In
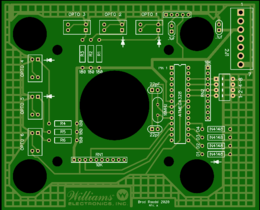
(PCB - Front)
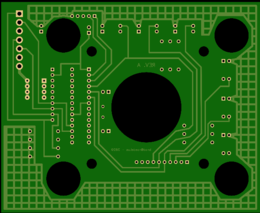
(PCB - Rear)
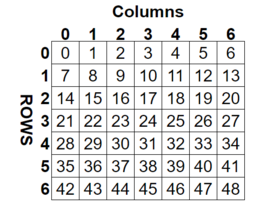
(49-Way Matrix Locations)



Original 49-Way

(Sinistar 49-Way)

(Sinistar - Disassembled)

(49-Way PCB)

(Slotted Optical Switch
(Slotted Optical Switch Diagram)





Programmed Joystick Emulations
- The images and most of the information below is from Sean Riddle's site and the work he did building an EPROM based translator. You can visit his site HERE. (Thanks Sean!)
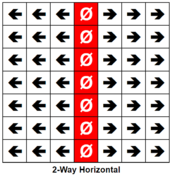
Horizontal)
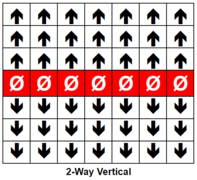
Vertical)

(4-Way)
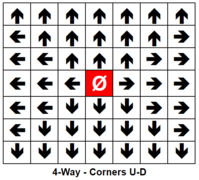
Corners U/D
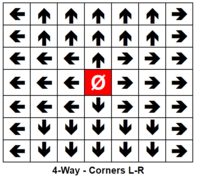
Corners L/R)
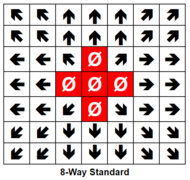
Standard)

With Dead Zone)

No Dead Zone)

(49-Way)









Amtel Microprocessor Source Code:
//Program Written By: Brad Raedel
//03242020 - Revision A
//** All 8 Profiles active
//** Outputs now change to inputs when not active - This allows the pull-up resistors to control the high logic
//03162020 - Revision 1 - Just get it working
//Up
int Opto1 = 2; //Input Pin 2
int Opto2 = 3; //Input Pin 3
int Opto3 = 4; //Input Pin 4
int Up = 9; //Output to Game - Pin 10
int Dn = 10; //Output to Game - Pin 11
//Down
int Opto4 = 5; //Input Pin 5
int Opto5 = 6; //Input Pin 6
int Opto6 = 7; //Input Pin 7
int Left = 11; //Output to Game - Pin 12
int Right = 12; //Output to Game - Pin 13
//Option Switches - These will be used to select mode/options (0 to 15)
int Op1 = A0; //1
int Op2 = A1; //2
int Op3 = A2; //4
int Op4 = A3; //8
int OpVal = 0; //Default to zero
bool Opto1St; //Opto States
bool Opto2St;
bool Opto3St;
bool Opto4St;
bool Opto5St;
bool Opto6St;
bool UpSt; //Set HIGH when stick is UP
bool DnSt; //Set HIGH when Stick is DOWN
bool LtSt; //Set HIGH when stick is LEFT
bool RtSt; //Set HIGH when Stick is RIGHT
bool LockedStUD;//Used to Latch the UP or DOWN position
bool LockedStLR;//Used to Latch the LEFT or RIGH postion
int UpVal = 3; //Store the Up position (0-2)
int DnVal = 3; //Store the Down postion (0-2)
int UpDnPos = 3; //Absolute postion of Up/Down 0 = Top, 6 = Bottom, 3 is Center/Neutral
int LtVal = 3; //Store the Left position (0-2)
int RtVal = 3; //Store the Right position (0-2)
int LtRtPos = 3; //Absolute postion of Left/Right 0 = Left, 6 = Right, 3 is Center/Neutral
int AbsPos = 24;
int i = 0;
//Rows Then Columns - Stored Like this { {Row 0 - 0 to 48},{Row 2 - 0 to 48}...etc..
// 8-Way Standard
const bool Up8WayStd[49] = {1,1,1,1,1,1,1,1,1,1,1,1,1,1,0,0,1,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Dn8WayStd[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,1,0,0,1,1,1,1,1,1,1,1,1,1,1,1,1,1} ;
const bool Lt8WayStd[49] = {1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1,1,0,0,0,0,1,1,0,0,0,0,0,1,1,1,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0} ;
const bool Rt8WayStd[49] = {0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,1,1,1,0,0,0,0,0,1,1,0,0,0,0,1,1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1} ;
// 8-Way with NO Dead Zone
const bool Up8WayNoDZ[49] = {1,1,1,1,1,1,1,1,1,1,1,1,1,1,0,0,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Dn8WayNoDZ[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,1,1,0,0,1,1,1,1,1,1,1,1,1,1,1,1,1,1} ;
const bool Lt8WayNoDZ[49] = {1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0} ;
const bool Rt8WayNoDZ[49] = {0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1} ;
// 8-Way with Dead Zone
const bool Up8WayDZ[49] = {1,1,1,1,1,1,1,1,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Dn8WayDZ[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,1,1,1,1,1,1,1,1,1,1,1,1,1} ;
const bool Lt8WayDZ[49] = {1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0} ;
const bool Rt8WayDZ[49] = {0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1,0,0,0,0,0,1,1} ;
//4-Way Standard
const bool Up4WayStd[49] = {0,1,1,1,1,1,0,0,0,1,1,1,0,0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Dn4WayStd[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0,0,1,1,1,0,0,0,0,1,1,1,1,0} ;
const bool Lt4WayStd[49] = {0,0,0,0,0,0,0,1,0,0,0,0,0,0,1,1,0,0,0,0,0,1,1,1,0,0,0,0,1,1,0,0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Rt4WayStd[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0,0,1,1,0,0,0,0,1,1,1,0,0,0,0,0,1,1,0,0,0,0,0,0,1,0,0,0,0,0,0,0} ;
//4-Way Corners L/R
const bool Up4WayLR[49] = {0,1,1,1,1,1,0,0,1,1,1,1,1,0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Dn4WayLR[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0,1,1,1,1,1,0,0,1,1,1,1,1,0} ;
const bool Lt4WayLR[49] = {1,0,0,0,0,0,0,1,0,0,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,0,0,0,0,0,0,1,0,0,0,0,0,0} ;
const bool Rt4WayLR[49] = {0,0,0,0,0,0,1,0,0,0,0,0,0,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,0,0,1,0,0,0,0,0,0,1} ;
//4-Way Corners U/D
const bool Up4WayUD[49] = {1,1,1,1,1,1,1,0,1,1,1,1,1,0,0,0,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Dn4WayUD[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,1,1,0,0,0,1,1,1,1,1,0,1,1,1,1,1,1,1} ;
const bool Lt4WayUD[49] = {0,0,0,0,0,0,0,1,0,0,0,0,0,0,1,1,0,0,0,0,0,1,1,1,0,0,0,0,1,1,0,0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Rt4WayUD[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0,0,1,1,0,0,0,0,1,1,1,0,0,0,0,0,1,1,0,0,0,0,0,0,1,0,0,0,0,0,0,0} ;
// 2-Way Horizontal
const bool Up2WayH[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Dn2WayH[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Lt2WayH[49] = {1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0} ;
const bool Rt2WayH[49] = {0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1,0,0,0,0,1,1,1} ;
// 2-Way Vertical
const bool Up2WayV[49] = {1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Dn2WayV[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1} ;
const bool Lt2WayV[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
const bool Rt2WayV[49] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0} ;
bool UpOut[49] = {};
bool DnOut[49] = {};
bool LtOut[49] = {};
bool RtOut[49] = {};
void setup() {
//Serial.begin(57600); //Disable when not debugging
pinMode(Opto1,INPUT); //Set Direction of physical inputs/outputs
pinMode(Opto2,INPUT);
pinMode(Opto3,INPUT);
pinMode(Opto4,INPUT);
pinMode(Opto5,INPUT);
pinMode(Opto6,INPUT);
pinMode(Up,INPUT);
pinMode(Dn,INPUT);
pinMode(Left,INPUT);
pinMode(Right,INPUT);
pinMode(Op1,INPUT);
pinMode(Op2,INPUT);
pinMode(Op3,INPUT);
pinMode(Op4,INPUT);
//Let's get our DIP Switch settings (Will = 0 to 15)
if (digitalRead(Op1) == HIGH)
{
OpVal = 1;
}
if (digitalRead(Op2) == HIGH)
{
OpVal = OpVal + 2;
}
if (digitalRead(Op3) == HIGH)
{
OpVal = OpVal + 4;
}
if (digitalRead(Op4) == HIGH)
{
OpVal = OpVal + 8;
}
//Serial.println(OpVal);
switch (OpVal) {
case 0: //DIP Switch 0 - 8-Way - No Dead zone - This routine copies the array - Only on setup, not during loop/runtime
// 8WayStd
i = 0;
while( i < 49 ){
UpOut[ i ] = Up8WayStd[ i ];
DnOut[ i ] = Dn8WayStd[ i ];
LtOut[ i ] = Lt8WayStd[ i ];
RtOut[ i ] = Rt8WayStd[ i ];
++i;}
break;
case 1: //DIP Switch 1 -
// 8WayNoDZ
i = 0;
while( i < 49 ){
UpOut[ i ] = Up8WayNoDZ[ i ];
DnOut[ i ] = Dn8WayNoDZ[ i ];
LtOut[ i ] = Lt8WayNoDZ[ i ];
RtOut[ i ] = Rt8WayNoDZ[ i ];
++i;}
break;
case 2: //DIP Switch 2 -
// 8WayDZ
i = 0;
while( i < 49 ){
UpOut[ i ] = Up8WayDZ[ i ];
DnOut[ i ] = Dn8WayDZ[ i ];
LtOut[ i ] = Lt8WayDZ[ i ];
RtOut[ i ] = Rt8WayDZ[ i ];
++i;}
break;
case 3: //DIP Switch 3 -
// 4WayStd
i = 0;
while( i < 49 ){
UpOut[ i ] = Up4WayStd[ i ];
DnOut[ i ] = Dn4WayStd[ i ];
LtOut[ i ] = Lt4WayStd[ i ];
RtOut[ i ] = Rt4WayStd[ i ];
++i;}
break;
case 4: //DIP Switch 4 -
// 4WayLR
i = 0;
while( i < 49 ){
UpOut[ i ] = Up4WayLR[ i ];
DnOut[ i ] = Dn4WayLR[ i ];
LtOut[ i ] = Lt4WayLR[ i ];
RtOut[ i ] = Rt4WayLR[ i ];
++i;}
break;
case 5: //DIP Switch 5 -
// 4WayUD
i = 0;
while( i < 49 ){
UpOut[ i ] = Up4WayUD[ i ];
DnOut[ i ] = Dn4WayUD[ i ];
LtOut[ i ] = Lt4WayUD[ i ];
RtOut[ i ] = Rt4WayUD[ i ];
++i;}
break;
case 6: //DIP Switch 6 -
// 2WayH
i = 0;
while( i < 49 ){
UpOut[ i ] = Up2WayH[ i ];
DnOut[ i ] = Dn2WayH[ i ];
LtOut[ i ] = Lt2WayH[ i ];
RtOut[ i ] = Rt2WayH[ i ];
++i;}
break;
case 7: //DIP Switch 7 -
// 2WayV
i = 0;
while( i < 49 ){
UpOut[ i ] = Up2WayV[ i ];
DnOut[ i ] = Dn2WayV[ i ];
LtOut[ i ] = Lt2WayV[ i ];
RtOut[ i ] = Rt2WayV[ i ];
++i;}
break;
}
}
//Main Program that loops
void loop() {
// Up/Down Logic
Opto1St = digitalRead(Opto1); //Read Optical Switch 1
Opto2St = digitalRead(Opto2); //Read Optical Switch 2
Opto3St = digitalRead(Opto3); //Read Optical Switch 2
if (Opto1St == true && Opto2St == true && Opto3St == true) //Determine if the joystick is in the center
{
LockedStUD = false; //Unlatch to allow Up or Down to assume control
UpSt = false; //Clear Up State
DnSt = false; //Clear Down State
UpDnPos = 3; //Set Vertical position to center
}
//Latch Direction (Determines if up or down
if (Opto1St == false && LockedStUD == false) //UP if True
{
UpSt = true; //Set UP State to TRUE
LockedStUD = true; //We lock the State so DOWN can't Steal it!
}
if (Opto3St == false && LockedStUD == false) //DOWN if True
{
DnSt = true; //Set DOWN State to TRUE
LockedStUD = true; //We lock the State so UP can't Steal it!
}
//We will figure out what row we are in (0 to 6 - 3 is center)
if (UpSt == true) //Up doesn't need any change since adding the Optical Switches is 0 to 2
{
UpVal = Opto1St + Opto2St + Opto3St;
UpDnPos = UpVal;
}
if (DnSt == true) //For Down, we determine how many Optical Switches are Low, add them up then use a look-up table to generate the position 4 to 6
{
DnVal = Opto1St + Opto2St + Opto3St;
switch (DnVal) {
case 0: //All Optos are LOW
UpDnPos = 6;
break;
case 1: //Two of the Optos are LOW
UpDnPos = 5;
break;
case 2: //One of the Optos are LOW (The others are still High)
UpDnPos = 4;
break;
}
}
// Left/Right Logic
Opto4St = digitalRead(Opto4); //Read Optical Switch 4
Opto5St = digitalRead(Opto5); //Read Optical Switch 5
Opto6St = digitalRead(Opto6); //Read Optical Switch 6
if (Opto4St == true && Opto5St == true && Opto6St == true) //Determine if the joystick is in the center
{
LockedStLR = false; //Unlatch to allow Left or Right to assume control
LtSt = false; //Clear Left State
RtSt = false; //Clear Right State
LtRtPos = 3; //Set Horizontal position to center
}
//Latch Direction (Determines if Left or Right
if (Opto4St == false && LockedStLR == false) //Right if True
{
RtSt = true; //Set Right State to TRUE
LockedStLR = true; //We lock the State so Left can't Steal it!
}
if (Opto6St == false && LockedStLR == false) //Left if True
{
LtSt = true; //Set Left State to TRUE
LockedStLR = true; //We lock the State so Right can't Steal it!
}
//We will figure out what row we are in (0 to 6 - 3 is center)
if (LtSt == true) //Up doesn't need any change since adding the Optical Switches is 0 to 2
{
LtVal = Opto4St + Opto5St + Opto6St;
LtRtPos = LtVal;
}
if (RtSt == true) //For Down, we determine how many Optical Switches are Low, add them up then use a look-up table to generate the position 4 to 6
{
RtVal = Opto4St + Opto5St + Opto6St;
switch (RtVal) {
case 0: //All Optos are LOW
LtRtPos = 6;
break;
case 1: //Two of the Optos are LOW
LtRtPos = 5;
break;
case 2: //One of the Optos are LOW (The others are still High)
LtRtPos = 4;
break;
}
}
//Calculate the absolute position
AbsPos = (UpDnPos * 7) + LtRtPos;
//Serial.println(AbsPos);
//Output
//UP
if (UpOut[AbsPos] == true){
pinMode(Up,OUTPUT);
digitalWrite(Up,LOW);
}
else {
pinMode(Up,INPUT);
}
//Down
if (DnOut[AbsPos] == true){
pinMode(Dn,OUTPUT);
digitalWrite(Dn,LOW);
}
else {
pinMode(Dn,INPUT);
}
//Left
if (LtOut[AbsPos] == true){
pinMode(Left,OUTPUT);
digitalWrite(Left,LOW);
}
else {
pinMode(Left,INPUT);
}
//Right
if (RtOut[AbsPos] == true){
pinMode(Right,OUTPUT);
digitalWrite(Right,LOW);
}
else {
pinMode(Right,INPUT);
}
}